Electrónica Analítica – Por qué los drivers pasivos limitan la conmutación en IGBT
Introducción
En el mundo de la electrónica de potencia, los IGBT (Insulated Gate Bipolar Transistor) se han consolidado como uno de los dispositivos más utilizados en aplicaciones de conversión de energía, inversores, variadores de velocidad, fuentes conmutadas y sistemas de energía renovable. Su capacidad de manejar altas tensiones y corrientes elevadas, combinada con un control relativamente sencillo en la compuerta, los hace dispositivos indispensables en la ingeniería electrónica moderna.
Sin embargo, cuando se trata de circuitos de excitación o drivers, surge una limitación importante: los drivers pasivos no siempre son suficientes para garantizar una conmutación rápida, eficiente y segura del IGBT.
En este artículo exploraremos a fondo qué son los drivers pasivos, su funcionamiento, las limitaciones que imponen en la conmutación de IGBTs, aspectos teóricos y matemáticos, simulaciones, ejemplos prácticos, y soluciones recomendadas para superar estas restricciones.
¿Qué es un driver pasivo?
Un driver pasivo es un circuito simple encargado de controlar la compuerta del IGBT (o de un MOSFET), sin necesidad de circuitos activos o amplificadores. Generalmente está conformado por:
- Resistencia de gate (Rg): regula la velocidad de carga y descarga de la capacitancia de compuerta.
- Fuente de alimentación directa: puede ser un voltaje fijo aplicado mediante una resistencia.
- Elementos adicionales simples: como diodos para controlar la dirección de corriente o evitar retroalimentaciones.
La principal característica de un driver pasivo es su simplicidad y bajo costo, pero esto se traduce en limitaciones significativas cuando se buscan altas frecuencias de conmutación o conmutaciones limpias y controladas.

Antecedentes y contexto histórico
Los primeros circuitos de excitación de transistores de potencia (BJT) y MOSFET en los años 70 y 80 se basaban en drivers pasivos, pues los requerimientos de frecuencia eran bajos y los dispositivos más lentos. Con el desarrollo de los IGBTs modernos y el aumento en las demandas de conmutación (decenas de kHz hasta cientos de kHz), se hizo evidente que los métodos pasivos generaban problemas como:
- Pérdidas por conmutación excesivas.
- Oscilaciones en la compuerta.
- Alta disipación de calor.
- Daño prematuro en el dispositivo.
Esto dio origen al desarrollo de drivers activos, integrados y aislados, que hoy en día son estándar en muchas aplicaciones industriales.
Funcionamiento del driver pasivo en IGBTs
Para entender la limitación, primero debemos repasar el proceso de encendido y apagado de un IGBT:
- Encendido: se aplica un voltaje positivo en la compuerta (10–15 V típicamente). Esto carga la capacitancia equivalente de gate (Cge + Cgc).
- Conmutación ON: cuando la carga supera el umbral (Vge(th)), el IGBT conduce.
- Apagado: se retira el voltaje y la capacitancia debe descargarse a través de la resistencia de gate.
En un driver pasivo, la carga/descarga depende únicamente de la resistencia en serie con la capacitancia del gate (Rg). Este fenómeno se modela como un circuito RC, lo que significa que el tiempo de conmutación está dado por:

donde:
- Rg = resistencia de compuerta
- Cge = capacitancia equivalente gate-emisor
Limitaciones de los drivers pasivos en la conmutación de IGBTs
- Velocidad limitada de conmutación
- Un Rg alto ralentiza la carga/descarga → conmutación lenta.
- Un Rg bajo acelera la conmutación, pero aumenta el riesgo de oscilaciones y sobrecorrientes.
- Pérdidas en la conmutación
Durante el tiempo en que el IGBT cambia de estado, existe una superposición entre tensión y corriente → pérdidas adicionales en forma de calor.

- Calentamiento excesivo del IGBT
Conmutaciones lentas elevan las pérdidas dinámicas → necesidad de disipadores más grandes. - Oscilaciones de compuerta (Gate ringing)
Debido a la inductancia parásita del circuito y la capacitancia del gate, aparecen oscilaciones peligrosas en la tensión de compuerta. - Problemas de conmutación inversa
Sin control activo, el IGBT puede encenderse por error debido a la capacitancia Miller (Cgc), especialmente en topologías half-bridge.
Simbología y representación en esquemas
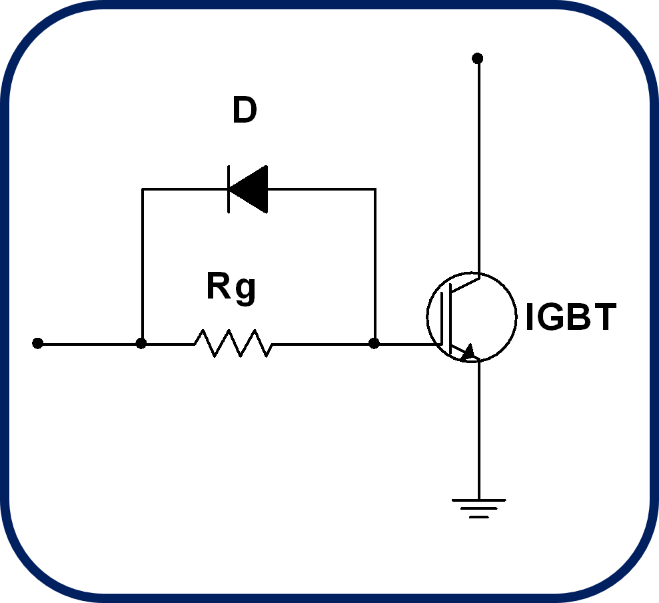
En los esquemas eléctricos, un driver pasivo se suele representar simplemente con:
- Una resistencia en serie al gate.
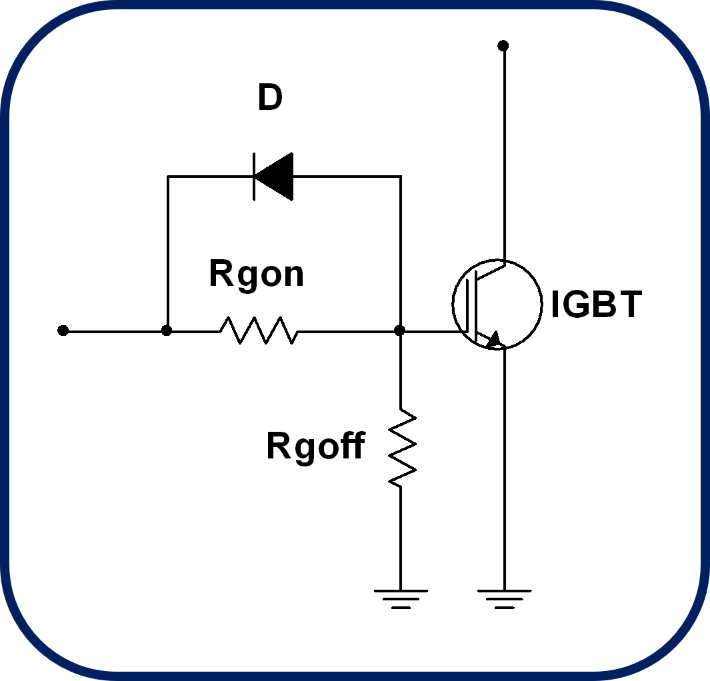
- A veces un diodo en antiparalelo con la resistencia, para diferenciar velocidad de encendido y apagado.
Ejemplo básico:
Ejemplo con control diferenciado:
Análisis matemático y fórmulas clave
1. Carga de compuerta

2. Tiempo de conmutación

3. Pérdidas en conmutación

Aplicaciones donde se usan drivers pasivos
- Pequeños inversores de baja frecuencia (<1 kHz).
- Cargas resistivas simples.
- Etapas experimentales o prototipos.
- Sistemas de baja potencia donde la eficiencia no es crítica.
Ejemplos prácticos
- Inversor casero de onda cuadrada
- Driver pasivo funciona aceptablemente para IGBTs o MOSFETs a bajas frecuencias (<1 kHz).
- Variadores industriales de 20–50 kHz
- Un driver pasivo no es viable → se requieren drivers activos con aislamiento.
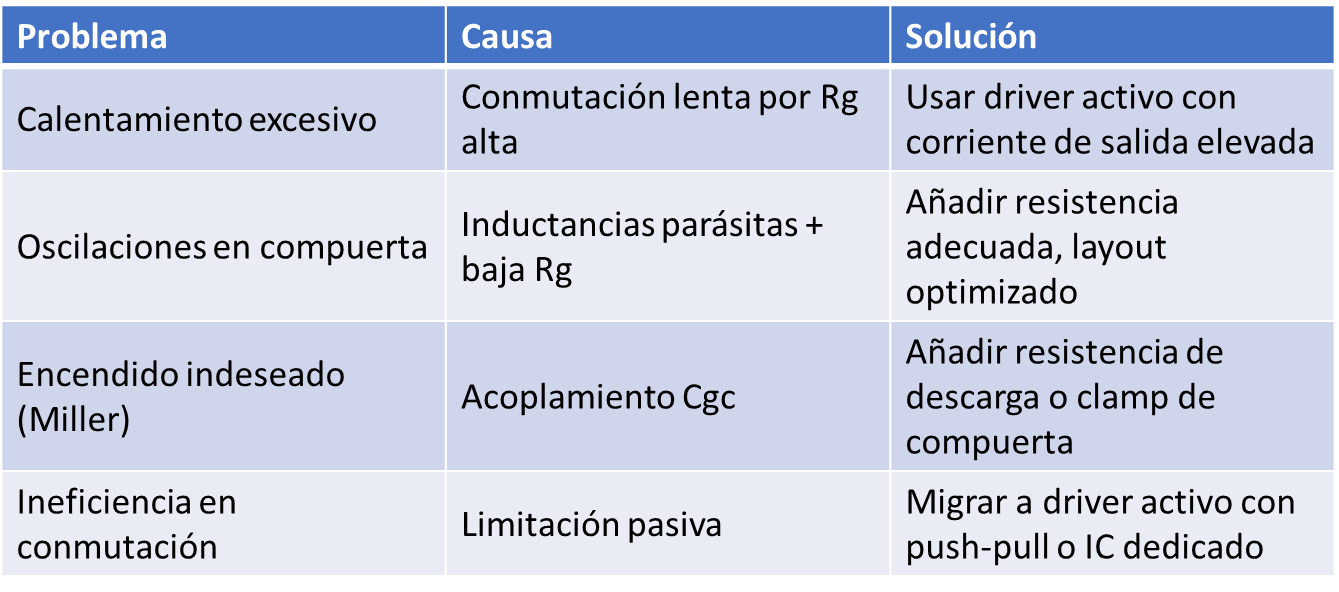
Problemas frecuentes y soluciones
Simulación en LTspice / Proteus
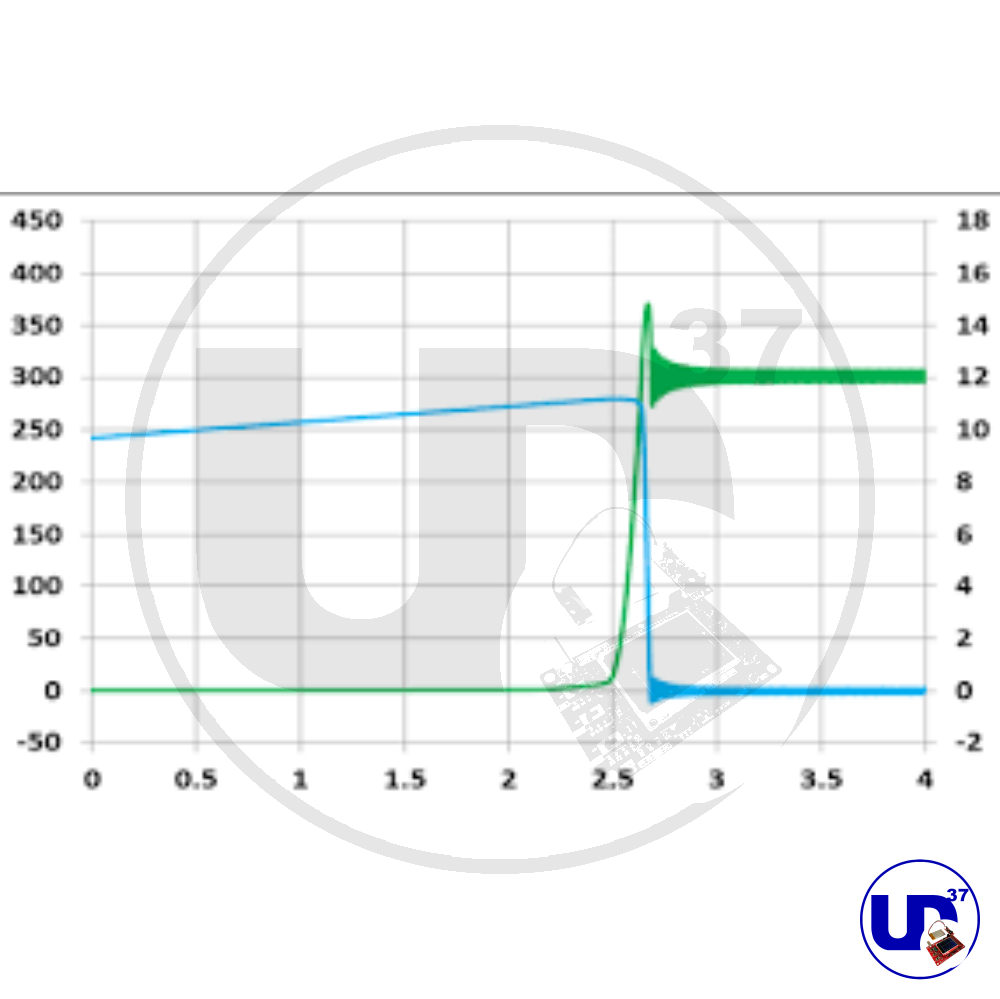
Una simulación típica de un driver pasivo sobre un IGBT puede realizarse en LTspice con:
- Fuente DC de 300 V.
- Carga resistiva de 10 Ω.
- IGBT con modelo de capacitancias.
- Driver pasivo con Rg = 22 Ω.
Resultados esperados:
- Curvas de conmutación lentas.
- Picos de corriente de compuerta.
- Oscilaciones de compuerta si no se ajusta la resistencia.
Comparación con driver activo:
- Reducción de tiempos de conmutación en más del 50%.
- Disminución de pérdidas de conmutación.
Parte experimental
En laboratorio, un montaje sencillo puede hacerse con:
- Fuente DC 100–200 V.
- IGBT típico (ej. IRG4PC50).
- Resistencia de carga.
- Osciloscopio para medir compuerta y colector.
Pruebas:
- Variar Rg (10 Ω – 47 Ω).
- Observar en el osciloscopio los tiempos de subida y bajada.
- Medir calentamiento con y sin driver activo.
Resultados prácticos:
- Con Rg altas → IGBT se calienta más rápido.
- Con Rg bajas → oscilaciones y riesgo de daño.
- Con driver activo → mejor equilibrio entre velocidad y estabilidad.
Conclusión
Los drivers pasivos son una solución económica y sencilla, pero presentan limitaciones críticas en la conmutación de IGBTs, especialmente a frecuencias medias y altas. Su naturaleza resistiva y dependiente de la capacitancia del gate los hace lentos, ineficientes y propensos a problemas como oscilaciones, pérdidas excesivas y sobrecalentamiento.
Para aplicaciones modernas en electrónica de potencia, la recomendación es migrar a drivers activos dedicados, capaces de entregar corrientes de compuerta controladas, aislamiento galvánico y protecciones integradas.
En resumen:
- Los drivers pasivos son útiles en aplicaciones simples y experimentales.
- No son adecuados para aplicaciones industriales exigentes.
- La simulación y experimentación demuestran que un driver activo mejora la eficiencia, reduce pérdidas y protege mejor al IGBT.